Given an m x n grid. Each cell of the grid has a sign pointing to the next cell you should visit if you are currently in this cell. The sign of grid[i][j] can be:
1which means go to the cell to the right. (i.e go fromgrid[i][j]togrid[i][j + 1])2which means go to the cell to the left. (i.e go fromgrid[i][j]togrid[i][j - 1])3which means go to the lower cell. (i.e go fromgrid[i][j]togrid[i + 1][j])4which means go to the upper cell. (i.e go fromgrid[i][j]togrid[i - 1][j])
Notice that there could be some signs on the cells of the grid that point outside the grid.
You will initially start at the upper left cell (0, 0). A valid path in the grid is a path that starts from the upper left cell (0, 0) and ends at the bottom-right cell (m - 1, n - 1) following the signs on the grid. The valid path does not have to be the shortest.
You can modify the sign on a cell with cost = 1. You can modify the sign on a cell one time only.
Return the minimum cost to make the grid have at least one valid path.
Example 1:
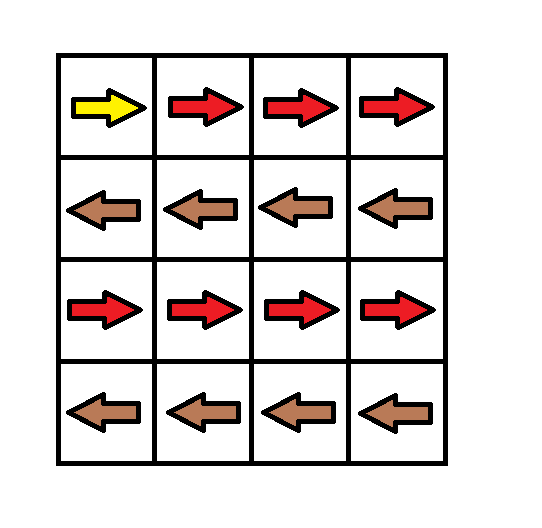
Input: grid = [[1,1,1,1],[2,2,2,2],[1,1,1,1],[2,2,2,2]] Output: 3 Explanation: You will start at point (0, 0). The path to (3, 3) is as follows. (0, 0) --> (0, 1) --> (0, 2) --> (0, 3) change the arrow to down with cost = 1 --> (1, 3) --> (1, 2) --> (1, 1) --> (1, 0) change the arrow to down with cost = 1 --> (2, 0) --> (2, 1) --> (2, 2) --> (2, 3) change the arrow to down with cost = 1 --> (3, 3) The total cost = 3.
Example 2:
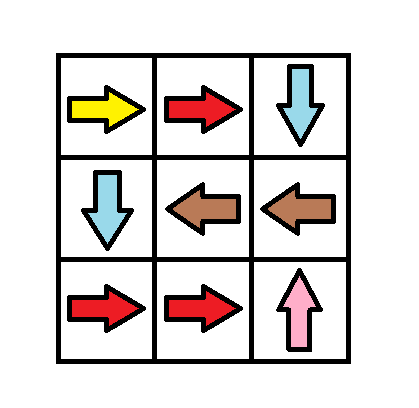
Input: grid = [[1,1,3],[3,2,2],[1,1,4]] Output: 0 Explanation: You can follow the path from (0, 0) to (2, 2).
Example 3:
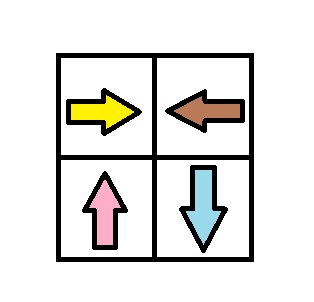
Input: grid = [[1,2],[4,3]] Output: 1
Constraints:
m == grid.lengthn == grid[i].length1 <= m, n <= 1001 <= grid[i][j] <= 4
Approach 01:
-
C++
-
Python
#include <vector>
#include <queue>
#include <utility>
class Solution {
public:
int minCost(std::vector<std::vector<int>>& grid) {
const int rows = grid.size();
const int cols = grid[0].size();
std::vector<std::vector<int>> costMemo(rows, std::vector<int>(cols, -1));
std::queue<std::pair<int, int>> bfsQueue;
// Start DFS from the top-left corner with an initial cost of 0
dfs(grid, 0, 0, 0, bfsQueue, costMemo);
// Process the BFS queue to explore all possible paths
for (int currentCost = 1; !bfsQueue.empty(); ++currentCost) {
for (int size = bfsQueue.size(); size > 0; --size) {
const auto [currentRow, currentCol] = bfsQueue.front();
bfsQueue.pop();
for (const auto& [dx, dy] : directions)
dfs(grid, currentRow + dx, currentCol + dy, currentCost, bfsQueue, costMemo);
}
}
// Return the minimum cost to reach the bottom-right corner
return costMemo.back().back();
}
private:
// Directions: right, left, down, up
static constexpr int directions[4][2] = {{0, 1}, {0, -1}, {1, 0}, {-1, 0}};
void dfs(const std::vector<std::vector<int>>& grid, int row, int col, int currentCost,
std::queue<std::pair<int, int>>& bfsQueue, std::vector<std::vector<int>>& costMemo) {
// Check for out-of-bounds indices
if (row < 0 || row >= grid.size() || col < 0 || col >= grid[0].size())
return;
// If this cell has already been visited with a lower cost, skip it
if (costMemo[row][col] != -1)
return;
// Mark the current cell with the current cost
costMemo[row][col] = currentCost;
// Add the current cell to the BFS queue
bfsQueue.emplace(row, col);
// Move in the direction indicated by the current cell's value
const auto& [dx, dy] = directions[grid[row][col] - 1];
dfs(grid, row + dx, col + dy, currentCost, bfsQueue, costMemo);
}
};
from typing import List
from collections import deque
class Solution:
def minCost(self, grid: List[List[int]]) -> int:
rows = len(grid)
cols = len(grid[0])
costMemo = [[-1] * cols for _ in range(rows)]
bfsQueue = deque()
# Start DFS from the top-left corner with an initial cost of 0
self.dfs(grid, 0, 0, 0, bfsQueue, costMemo)
# Process the BFS queue to explore all possible paths
currentCost = 1
while bfsQueue:
for _ in range(len(bfsQueue)):
currentRow, currentCol = bfsQueue.popleft()
for dx, dy in self.directions:
self.dfs(grid, currentRow + dx, currentCol + dy, currentCost, bfsQueue, costMemo)
currentCost += 1
# Return the minimum cost to reach the bottom-right corner
return costMemo[-1][-1]
# Directions: right, left, down, up
directions = [(0, 1), (0, -1), (1, 0), (-1, 0)]
def dfs(self, grid: List[List[int]], row: int, col: int, currentCost: int,
bfsQueue: deque, costMemo: List[List[int]]) -> None:
# Check for out-of-bounds indices
if not (0 <= row < len(grid)) or not (0 <= col < len(grid[0])):
return
# If this cell has already been visited with a lower cost, skip it
if costMemo[row][col] != -1:
return
# Mark the current cell with the current cost
costMemo[row][col] = currentCost
# Add the current cell to the BFS queue
bfsQueue.append((row, col))
# Move in the direction indicated by the current cell's value
dx, dy = self.directions[grid[row][col] - 1]
self.dfs(grid, row + dx, col + dy, currentCost, bfsQueue, costMemo)
Time Complexity:
- DFS Traversal:
The
dfsfunction visits each cell of the grid exactly once and marks it with a cost. Since there are \( m \times n \) cells in the grid, the DFS traversal takes \( O(m \times n) \). - BFS Traversal:
The BFS processes all cells in the grid, and each cell is added to the queue at most once. Thus, the BFS traversal also takes \( O(m \times n) \).
- Overall Time Complexity:
The overall time complexity is \( O(m \times n) \).
Space Complexity:
- Cost Memoization Array:
A 2D array
costMemoof size \( m \times n \) is used to store the minimum cost for each cell, requiring \( O(m \times n) \) space. - BFS Queue:
The BFS queue can hold up to \( O(m \times n) \) elements in the worst case, which contributes \( O(m \times n) \) to the space complexity.
- Overall Space Complexity:
The overall space complexity is \( O(m \times n) \).